
ICLR 2020
Authors
Philipp Holl, Technical University of Munich
Vladlen Koltun, Intel Labs
Nils Thuerey, Technical University of Munich
Abstract
Predicting outcomes and planning interactions with the physical world are long-standing goals for machine learning. A variety of such tasks involves continuous physical systems, which can be described by partial differential equations (PDEs) with many degrees of freedom. Existing methods that aim to control the dynamics of such systems are typically limited to relatively short time frames or a small number of interaction parameters. We present a novel hierarchical predictor-corrector scheme which enables neural networks to learn to understand and control complex nonlinear physical systems over long time frames. We propose to split the problem into two distinct tasks: planning and control. To this end, we introduce a predictor network that plans optimal trajectories and a control network that infers the corresponding control parameters. Both stages are trained end-to-end using a differentiable PDE solver. We demonstrate that our method successfully develops an understanding of complex physical systems and learns to control them for tasks involving PDEs such as the incompressible Navier-Stokes equations.
Links
![]() arXiv preprint
arXiv preprint
![]() OpenReview
OpenReview
![]() Experiments Code
Experiments Code
![]() Φ-Flow: differentiable PDE solver
Φ-Flow: differentiable PDE solver
![]() Supplemental material
Supplemental material
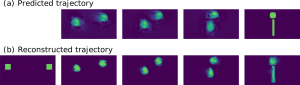
Fig. 1: Incompressible fluid control: Given an initial state (bottom left) and a target state (top right), our method infers a smooth trajectory (bottom sequence) that transforms one into the other while respecting all physical restrictions.
Acknowledgements
This work is supported by the ERC Starting Grant realFlow (StG-2015-637014) and the Intel Intelligent Systems Lab.